- Neben dem manuellen Betrieb können für das fahrerlose Transportsystem nun auch feste Fahrwege mithilfe eines Navigationssystems programmiert werden.
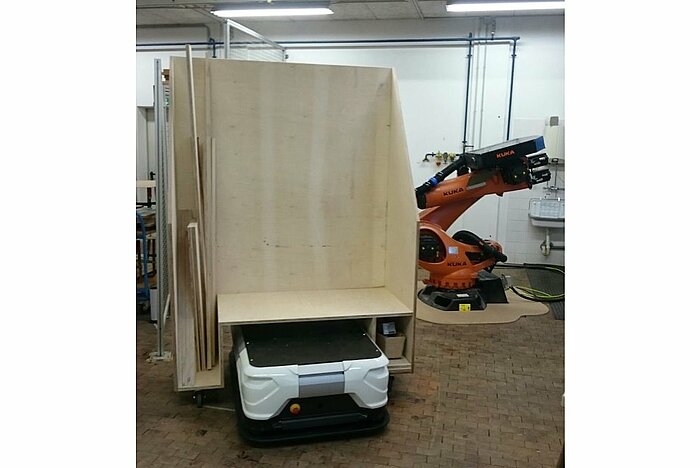
- Die Roboterzelle befindet sich im Aufbau:
- Der kollaborative Roboter wurde standfest im Boden verankert, eine spezielle Plattform wurde bereits konstruiert.
- Ein eigens konstruierter Vakuumgreifsaugarm für die Beschickung des Kommissionierconatiners wird aktuell zusammengebaut.
- Ein Linearsystem für die optische Erfassung wurde angeliefert
- An zwei provisorischen Kommissioniercontainern werden aktuell verschiedene Tests durchgeführt, betreffend den Transport via FTS sowie eine optische Fächeranzeige über LED-Leisten (Pick-by-light)