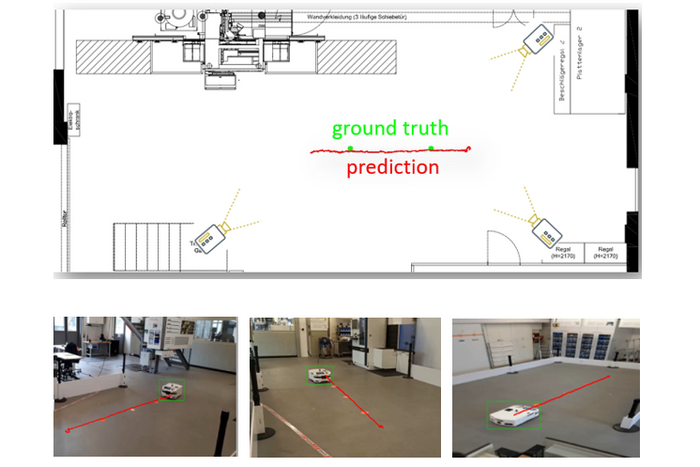
As part of a master's thesis, a multi-angle camera system was tested in the proto_lab, enabling enhanced object monitoring in production. This innovative system utilizes three cameras, each capturing the same scene (e.g. a moving transport robot / AGV) from different angles. These data are directly fed into a neural YOLO (You Only Look Once) network, enabling object detection in the first run. The three model predictions are then merged and the three camera perspectives are transferred to a 2D floor plan. The object can thus be localized with an accuracy of less than 5 cm.
During the initial testing phase, this system successfully identified both humans and AGVs in the proto_lab production environment. However, its potential is far from being fully realized. The model can be further trained to recognize any object, which significantly increases its functionality. This could both drive forward automation in production and improve operational safety.