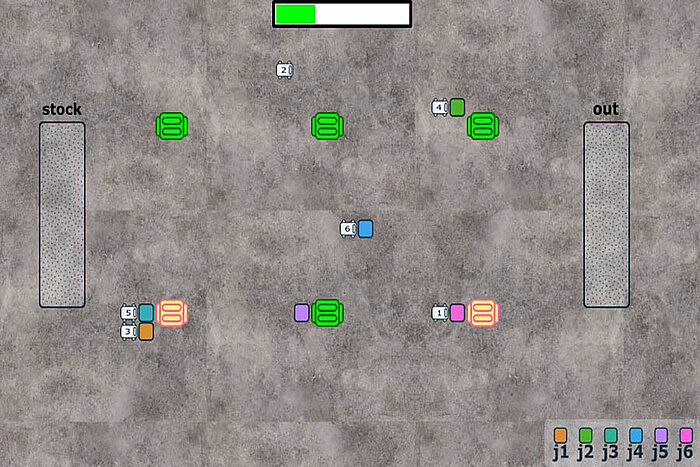
Im Projekt „A-IQ Ready“ wurde ein weiterer Meilenstein erreicht. Für den selbst entwickelten Fleet-Management-Algorithmus zur Lösung des job shop scheduling problems (siehe früherer Blogbeitrag) wurde nun ein Visualisierungstool geschaffen, das die Evaluierung der Software samt Fehlerbehebung deutlich beschleunigt. Über Bild- und Videosimulationsdaten lässt sich visuell feststellen, ob der angewandte Algorithmus eine optimale Auslastung von Produktionsmaschinen und AGVs gewährleistet. So fällt es beispielsweise sofort auf, wenn einzelne Maschinen im Gegensatz zu anderen mit Aufträgen überbelegt sind oder einzelne AGVs zu lange Strecken zurücklegen bzw. zu hohe Stillstandzeiten aufweisen. Dabei optimiert sich die lern-basierte Software permanent selbst, ermittelt für bevorstehende Bauteil-/Produkttransporte die jeweils kürzesten Entfernungen zwischen aktuellen AGV-Standorten und Maschinen oder lotst ein freies AGV schon vor Beendigung des aktuellen Arbeitsschrittes an eine Maschine, um Wartezeiten gänzlich zu eliminieren. Dabei kann die lernende Software mit der Zeit optimale Strategien entwickeln, so wie es einem Menschen wahrscheinlich nicht gelingen würde.
In einem nächsten Schritt wird der im Modell trainierte Algorithmus über Sim2Real dann in die reale Produktionsumgebung im proto_lab übertragen werden. Damit dies gelingen kann, wurde der selbst entwickelte Algorithmus bereits eng auf die ScaliRo-Software zur Ansteuerung der AGVs abgestimmt.